Platforms and distributed systems
By the end of this module you will be able to:
- Explain MapReduce and the shared-nothing architecture that enables petabyte-scale processing
- Compare Snowflake, BigQuery, and Databricks as cloud data platform choices
- Explain the open table formats Delta Lake and Apache Iceberg and their role in the data lakehouse pattern
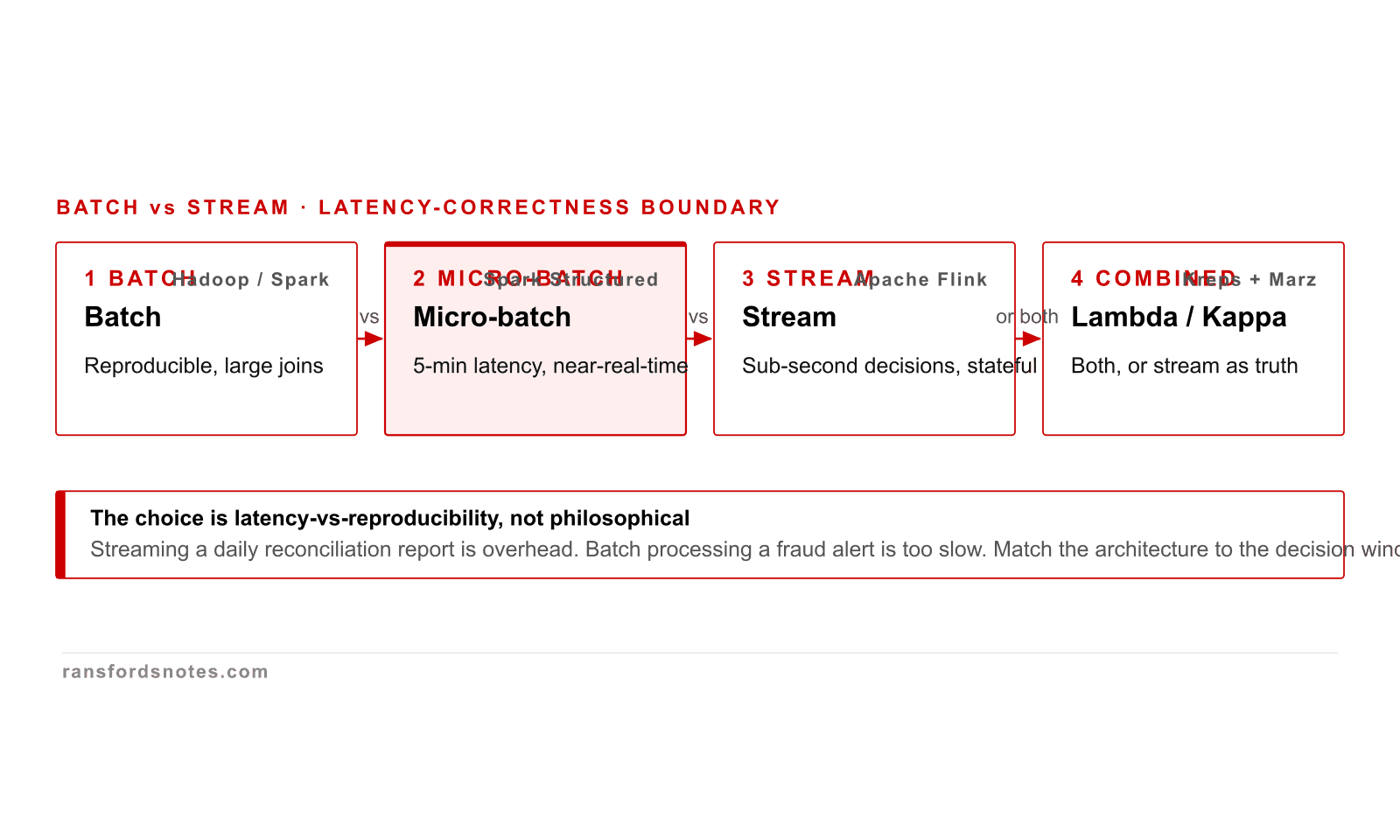
Batch and stream as choices on a latency-correctness boundary
Batch and stream are choices on a latency-correctness boundary, not philosophical opposites.
Batch and stream are not opposites; they are choices on a latency-and-correctness boundary. Batch wins for reproducibility, large joins, complex SQL. Stream wins for sub-second decisions and continuous state. Kappa architecture (Kreps) collapses the two into one stream; Lambda (Marz) runs both side by side.
CAP theorem: pick two of consistency, availability, partition
CAP theorem: pick two of consistency, availability, and partition tolerance; the practical choice is CP vs AP.
CAP theorem: a distributed system can guarantee any two of consistency, availability, and partition tolerance, but not all three. Network partition is the unavoidable real-world condition, so the choice is really between CP (consistency under partition) and AP (availability under partition). Gilbert and Lynch 2002 proved this formally.
Stream recovery uses source offset, checkpoint, and exactly-once sink
Stream recovery uses three mechanisms: source offset, checkpointed state, and exactly-once sink.
Stream recovery uses three mechanisms: source offset (where to restart), checkpointed state (what was computed), exactly-once sink (no duplicate writes). Apache Flink names this the savepoint trio; without all three, recovery silently double-counts or loses events.
Real-world scale · 2004
Google MapReduce: processing the entire web with commodity hardware
In 2004, Google engineers Jeff Dean and Sanjay Ghemawat published "MapReduce: Simplified Data Processing on Large Clusters." The paper described a programming model that decomposed large computation tasks into two phases: a Map phase that processes each input record independently and emits key-value pairs, and a Reduce phase that aggregates all values for each unique key.
The insight was that most large-scale data transformations could be expressed in this pattern, and that pattern was trivially parallelisable. Counting word frequencies across a billion documents: each Map function processes one document and emits (word, 1) pairs; each Reduce function sums the counts for one word. With 10,000 machines, the job runs in minutes instead of months.
MapReduce became the foundation of Hadoop, which became the foundation of the entire big data ecosystem. Although the original MapReduce framework has largely been replaced by Apache Spark and cloud-native query engines, the shared-nothing, partition-parallel architecture it introduced is still the underlying model of every major data platform today.
Google needed to index billions of web pages. A single powerful machine could not hold the web. MapReduce split the problem into independent units that could run in parallel on thousands of commodity machines. What fundamental insight does this encode about large-scale data processing?
Large-scale data platforms work by moving computation to partitions, then paying carefully for the few moments when data must cross the network.
24.1 Shared-nothing architecture and Apache Spark
Shared-nothing architecture distributes data and computation across nodes that do not share memory or storage. Each node processes its local partition independently, communicating only to shuffle data between partitions (for joins and aggregations). This architecture scales linearly: doubling the number of nodes approximately doubles throughput, because each additional node handles an additional partition.
Apache Spark replaced Hadoop MapReduce by keeping intermediate results in memory (RAM) rather than writing them to disk between each computation step. For iterative algorithms like machine learning training, where the same data is processed many times, this in-memory execution reduces job time by 10-100x compared to disk-bound MapReduce. Spark introduced resilient distributed datasets (RDDs) and later DataFrames and Datasets, which provide a columnar, SQL-friendly API while retaining the underlying parallel execution model.
Spark's lazy evaluation model builds a directed acyclic graph (DAG) of transformations before executing any computation. When an action (such as count or write) is triggered, the Catalyst optimiser rewrites the DAG to eliminate redundant steps, push filters as early as possible, and select efficient physical execution plans. This query optimisation is why writing idiomatic Spark code (using the DataFrame API, not RDDs) consistently outperforms manually optimised lower-level code.
The same partitioned execution idea appears in modern cloud platforms, but each product exposes a different operating model for cost, governance, and workload isolation.
“Spark can run programs up to 100x faster than Hadoop MapReduce in memory, or 10x faster on disk. When running on large datasets, the in-memory advantage is decisive for iterative algorithms.”
Matei Zaharia et al., 'Resilient Distributed Datasets: A Fault-Tolerant Abstraction for In-Memory Cluster Computing', NSDI (2012)
The performance advantage of in-memory execution is not just about speed: it makes entire categories of algorithm (iterative ML training, graph algorithms, interactive analytics) practical at scale. Hadoop MapReduce made batch analytics possible at petabyte scale; Spark made interactive and iterative analytics practical at the same scale.
24.2 Cloud data platforms: Snowflake, BigQuery, and Databricks
Snowflake uses a hybrid of shared-disk and shared-nothing ideas. Persisted data sits in a central repository accessible by compute clusters, while query processing runs on massively parallel compute clusters. Virtual warehouses can be sized and paused independently, which makes workload isolation and cost control board-level design decisions rather than database administrator tuning details.
Google BigQuery is a serverless analytical warehouse: users submit SQL queries without managing clusters. Its operating discipline is different from Snowflake because query cost and performance are strongly shaped by bytes scanned, partitioning, clustering, slot reservations, and governance of who can launch expensive queries.
Databricks builds around Apache Spark, Delta Lake, notebooks, jobs, SQL, and ML tooling. Its strength is mixed workload development: the same platform can ingest events, transform lake data, train models, serve features, and expose SQL analytics. The leadership trade-off is integration versus dependency: one platform can reduce hand-offs, but it also concentrates governance, skills, and commercial risk.
A simple decision test keeps platform selection honest. If the workload is governed SQL analytics with many independent business users, start with a warehouse pattern. If the workload mixes engineering, streaming, ML, and feature pipelines, start with a lakehouse pattern. If sub-second operational decisions are required, keep a serving store or stream processor in the design rather than forcing every decision through the analytical warehouse.
The lakehouse pattern exists because teams wanted open object storage economics without giving up transactional table behaviour.
Common misconception
“Cloud data warehouses like Snowflake and BigQuery are just hosted databases and offer no architectural advantages over on-premise SQL servers.”
Cloud warehouses differ architecturally from traditional row-store systems in several critical ways: compute and storage can scale separately, analytical storage is column-oriented, execution is massively parallel, and serverless or elastic compute reduces idle capacity. That does not make them automatically cheaper or faster. Poor partitioning, uncontrolled scans, and weak access governance can make a cloud warehouse expensive quickly.
24.3 The data lakehouse: Delta Lake and Apache Iceberg
Data lakes (raw files in object storage, schema-on-read) offered cheap scalable storage but no ACID guarantees, no schema enforcement, and poor query performance on small files. Data warehouses offered ACID and performance but were expensive and required schema-on-write. The lakehouse pattern combines cheap open-format storage with warehouse-quality reliability by adding a transactional metadata layer over the data lake.
Delta Lake (Databricks, open-sourced 2019) adds a transaction log to Parquet files stored in object storage. Every write creates a new log entry describing the files added or removed. This provides ACID transactions (readers never see partial writes), time travel (querying the state of the table at any past timestamp), schema evolution (adding columns without rewriting history), and efficient upserts and deletes. Delta Lake is the foundation of the Databricks Lakehouse Platform.
Apache Iceberg (created at Netflix and now an Apache project) solves the same class of problems with a snapshot and manifest architecture rather than a single sequential log. Iceberg's hidden partitioning allows queries to prune data without requiring users to know the partition layout. Its main strategic value is engine neutrality: Spark, Flink, Trino, Presto, Hive, and Impala can safely work with the same tables.
The architectural distinction is important for executives as well as engineers. A lakehouse is not just a new name for a data lake. It is a commitment to table-level contracts: schema change rules, ACID writes, retention and vacuum rules, lineage, access control, compaction, snapshot retention, and recovery. Without those controls, the organisation still has cheap files, not trusted analytical tables.
A data engineering team runs a nightly Spark job that reads 2TB of raw events, applies 12 sequential transformations, and writes aggregated results to a data warehouse. The job takes 4 hours and the team needs to reduce it to under 30 minutes. Which architectural change offers the most use?
A team using a data lake (CSV files in S3) discovers that a pipeline bug wrote incorrect customer records last Tuesday. They need to: (1) view the table as it was before the bad write, and (2) restore the correct state. Which table format supports this without manual backup restoration?
A BigQuery table containing 10 years of web clickstream data (5TB total) is queried for events from the last 7 days. A query engineer notices that every query scans the full 5TB and costs $25 per run, even though only 50GB of recent data is relevant. What is the most effective fix?
Core checks before moving on
- Shared-nothing architecture distributes data and computation across independent partitions; shuffles are the expensive moments to design around.
- Spark made iterative and interactive large-scale processing practical by using memory, DataFrames, and query optimisation rather than disk-heavy MapReduce stages.
- Snowflake, BigQuery, and Databricks differ most in operating model: warehouse isolation, serverless scan economics, and integrated lakehouse development.
- Delta Lake and Apache Iceberg add table reliability to object storage through transaction metadata, snapshots, schema evolution, and recovery features.
- Platform strategy fails when cost, ownership, access control, and recovery rules are treated as operations details rather than design constraints.
Standards and sources cited in this module
The founding paper for distributed data processing. Introduced the Map/Reduce programming model that underpins all subsequent big data frameworks.
The Spark paper introducing RDDs and in-memory distributed computation. Source for the 100x performance improvement claim over Hadoop MapReduce.
Delta Lake documentation: ACID transactions and time travel
Reference for Delta Lake's transaction log, time travel queries, schema evolution, and RESTORE TABLE commands.
Reference for Iceberg's snapshot model, hidden partitioning, and engine-agnostic open table format specification.
Snowflake documentation: key concepts and architecture
Official source for Snowflake's hybrid shared-disk and shared-nothing architecture and managed cloud operating model.
Google BigQuery documentation: introduction to BigQuery
Official source for BigQuery's serverless analytics model, storage, compute, and SQL execution concepts.
Module 24 of 26 · Practice & Strategy